Tipos de Servomotores
Qué es un Servomotor
Los servomotores se consideran parte de un sistema de bucle cerrado que incluye un sistema de control, un amplificador, un servomotor y un codificador/resolvedor. Un servomotor es un motor eléctrico que hace girar piezas de una máquina con gran eficacia y una precisión excepcional. Un servomotor acopla un motor normal con un sensor de interpretación posicional que le permite controlar la velocidad lineal o rotacional y la posición. En resumen, un servomotor es un dispositivo que produce movimiento en respuesta a una orden y regula la dirección y la velocidad del movimiento producido en respuesta a la realimentación.
Joseph Facort utilizó por primera vez el término servo en 1859, cuando controló los timones de un barco utilizando vapor. Los servomotores se utilizan en muchos productos y dispositivos que usamos habitualmente. Los servomotores se utilizan en todos los ordenadores y consolas de videojuegos con reproductor de DVD, ya que el servomotor es responsable de la extensión y retracción del disco. Además, en todos los vehículos modernos, un servomotor controla el acelerador cuando el sensor detecta que se pisa el acelerador. Y lo que es más importante, los servomotores se utilizan ampliamente en aeronaves, robótica y aplicaciones de automatización industrial.
Tipos de Servomotores
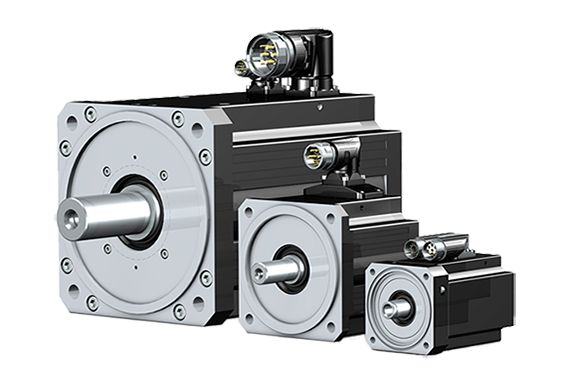
Los principales tipos de servomotores que trataremos en nuestro artículo son los servomotores de CA, los servomotores de CC, los servomotores de rotación posicional, los servomotores de rotación continua y los servomotores lineales.
La primera característica que define a un motor eléctrico, y a los servomotores, es la corriente con la que funcionan, que puede ser CA o CC.
Servomotor de CC(DC)
Como su nombre indica, un servomotor de CC es un servomotor que funciona con corriente continua, o en otras palabras; es un motor de CC con sensores y codificadores para proporcionar retroalimentación y control de bucle cerrado. Los servomotores de CC no están diseñados para soportar muchos picos de potencia y son mejores que los servomotores de CA para aplicaciones más pequeñas. Los servomotores de CC(DC) se utilizan habitualmente en robótica, automatización y maquinaria CNC por su versatilidad y alto nivel de precisión.
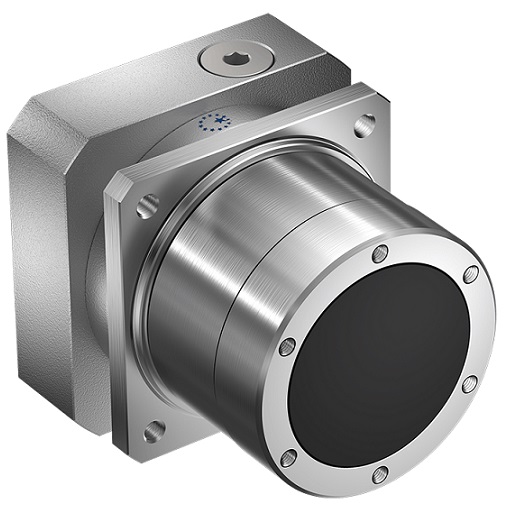
Los servomotores de CC(DC) pueden distinguirse como con escobillas o sin escobillas. Los motores de CC con escobillas se conmutan mecánicamente con un conmutador y escobillas, mientras que un motor de CC sin escobillas se conmuta electrónicamente con sensores. Los motores de CC sin escobillas son más adecuados para las aplicaciones servo porque tienen mayor eficiencia y fiabilidad que los motores sin escobillas, que son más propensos al desgaste, especialmente en las escobillas.

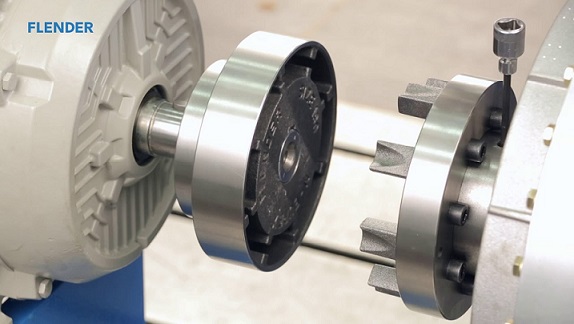
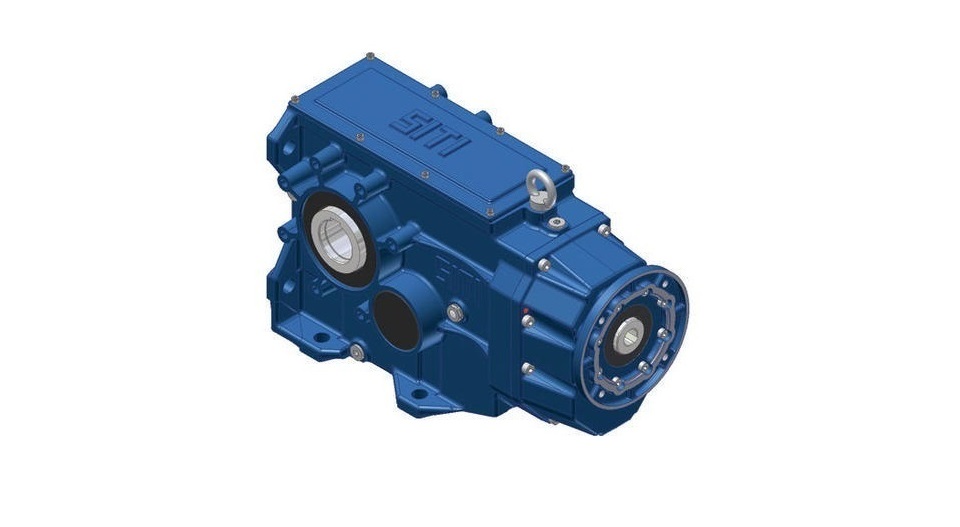
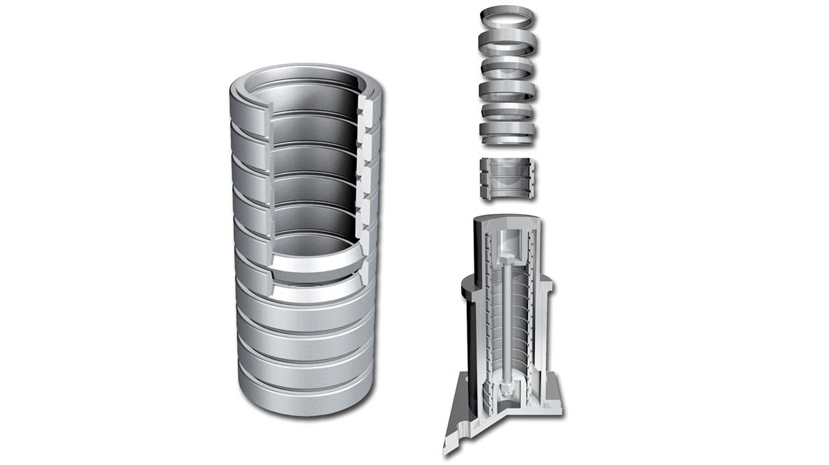
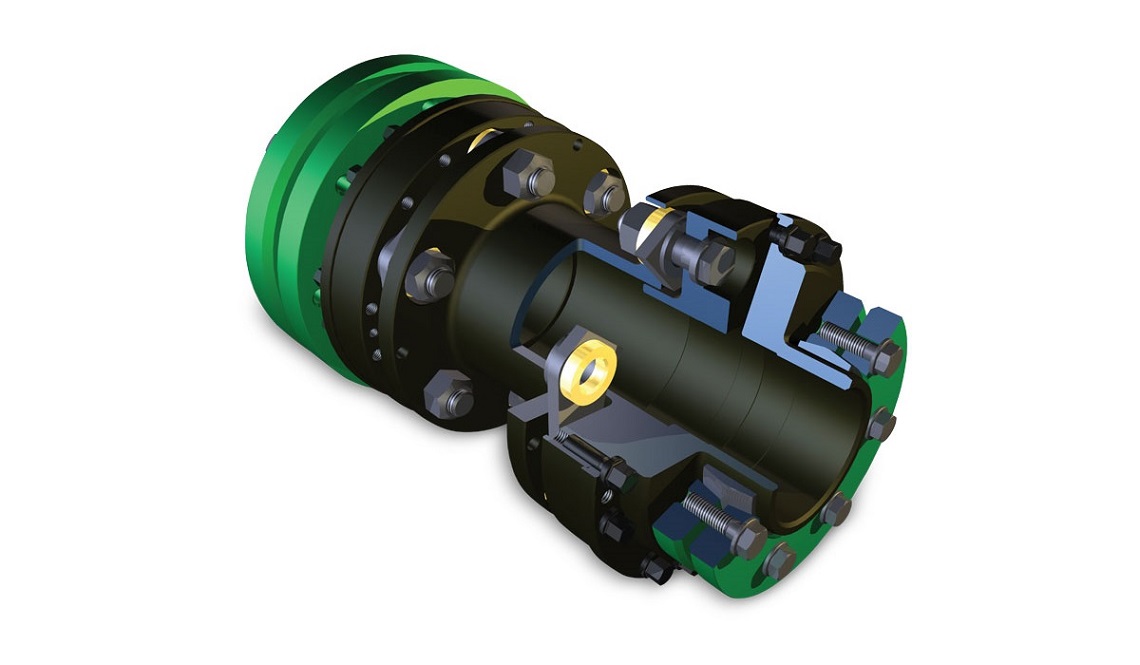
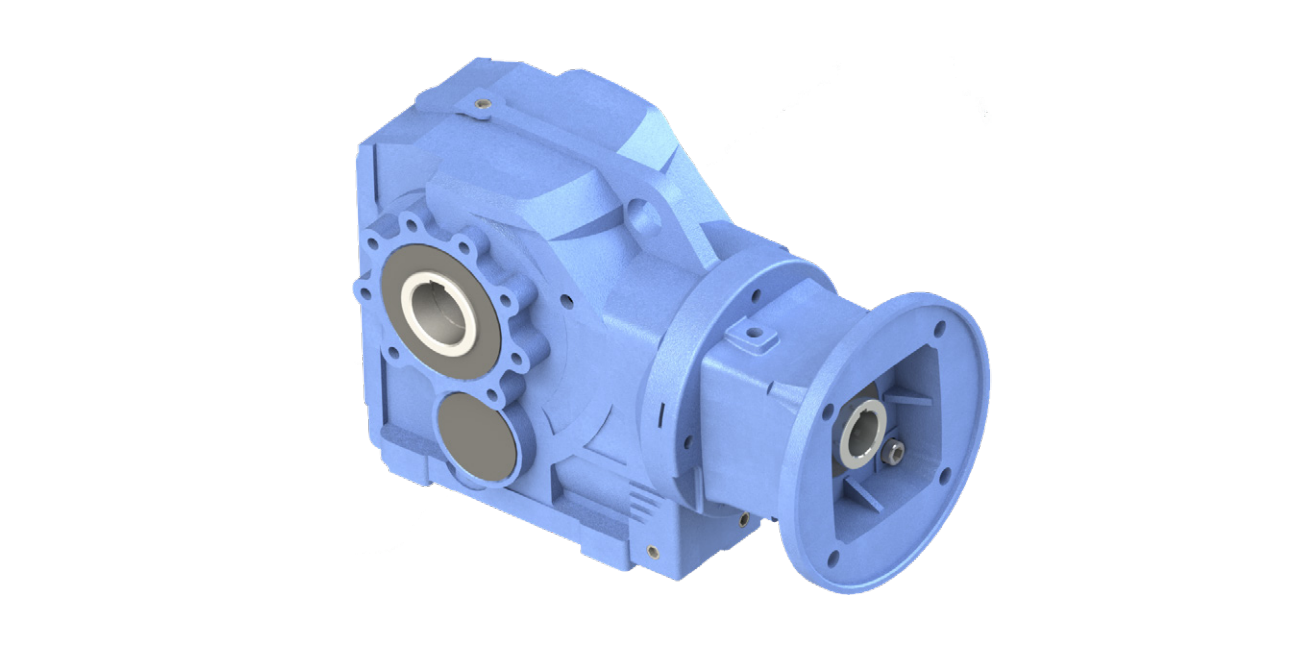
Servomotor CC(DC) de Wittenstein
Servomotor de CA(AC)
Un servomotor de CA es un servomotor que funciona con corriente alterna y consta de un codificador y un controlador para controlar y recibir retroalimentación del bucle cerrado. Los servomotores de CA se utilizan principalmente en aplicaciones de alta precisión. Pueden diseñarse para crear pares aún mayores utilizando tensiones más altas. Son más caros, más eficientes y pueden soportar más picos de corriente que los servomotores de CC debido a su diseño.
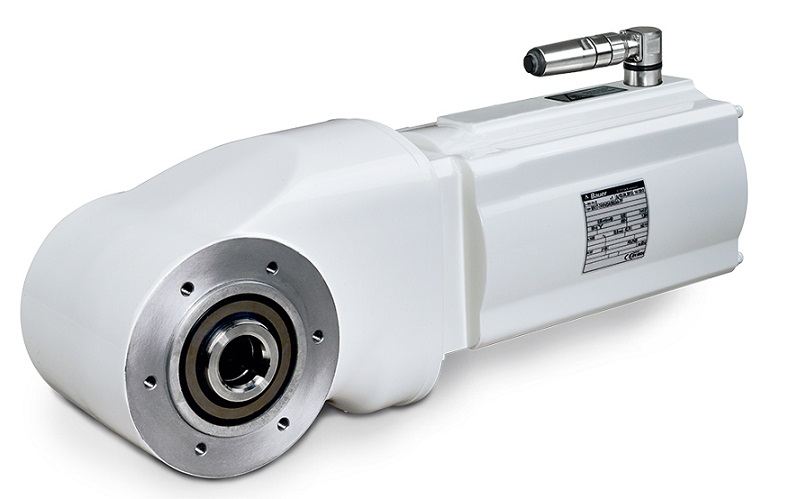
Los dos tipos principales de motores de CA son los servomotores de CA síncronos y asíncronos. Se diferencian por la velocidad del rotor respecto a la del estator. En un servomotor síncrono, las velocidades del rotor y del estator son iguales. Mientras que en un servomotor asíncrono, la velocidad del rotor es inferior a la del estator. Los servomotores asíncronos, también conocidos como servomotores de inducción, pueden producir más par debido al deslizamiento causado por la diferencia de velocidad entre el eje y el campo magnético. En los servomotores síncronos no hay deslizamiento porque el estator y el rotor están sincronizados y requieren una fuente de alimentación de CA externa. Los servomotores síncronos se utilizan en aplicaciones como centrales eléctricas e instalaciones de fabricación, mientras que los servomotores asíncronos se emplean en ventiladores centrífugos y compresores, cintas transportadoras, cafeteras y ascensores.

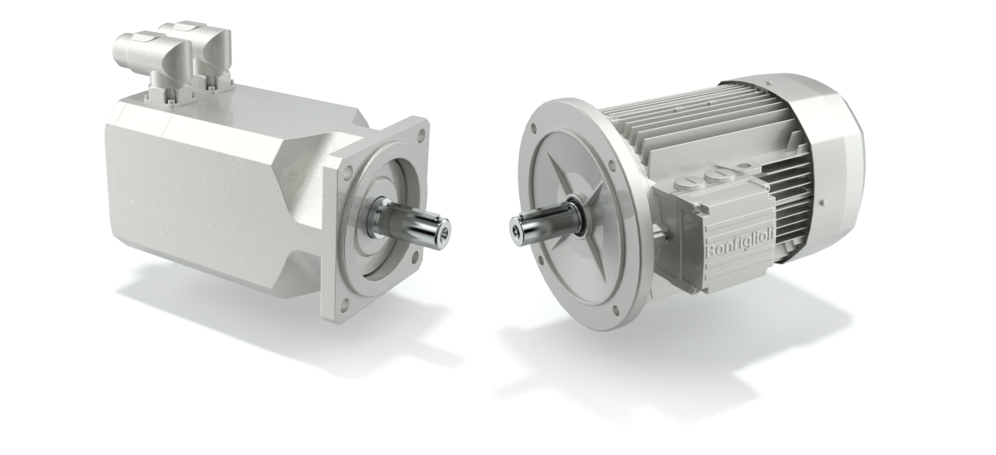
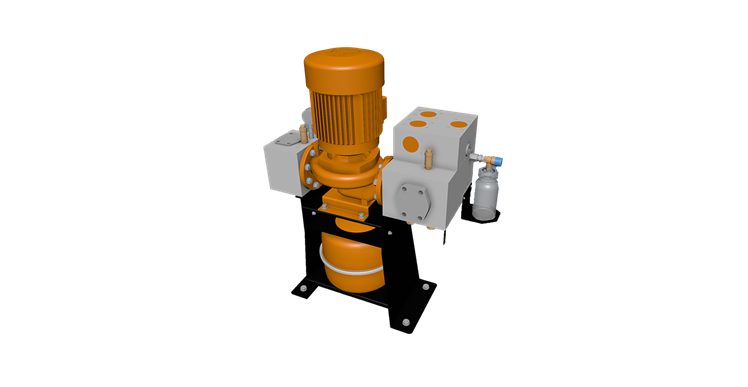
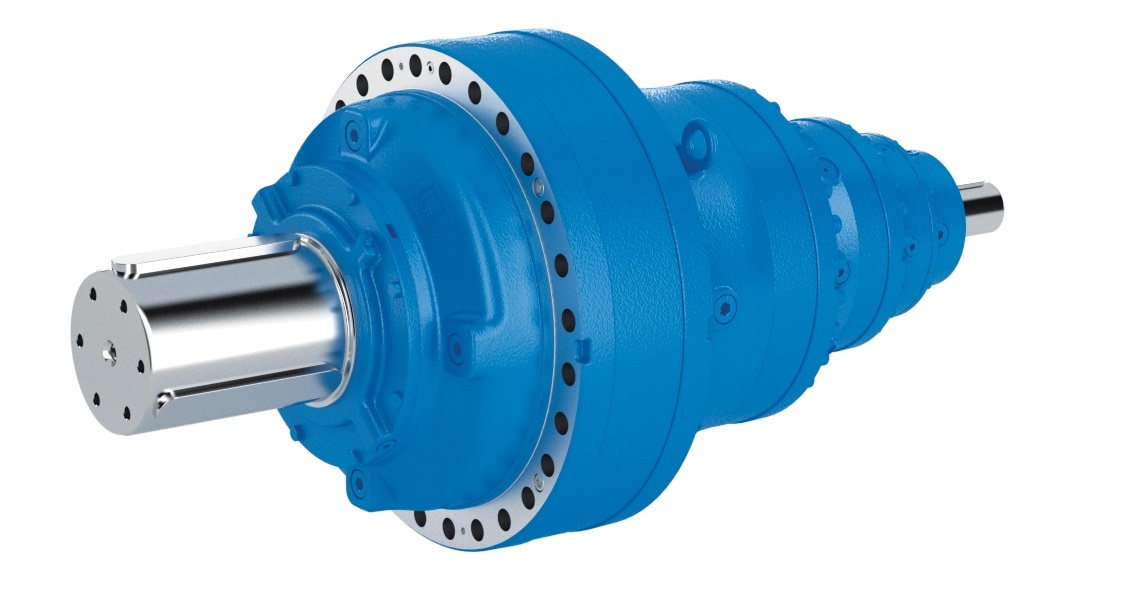
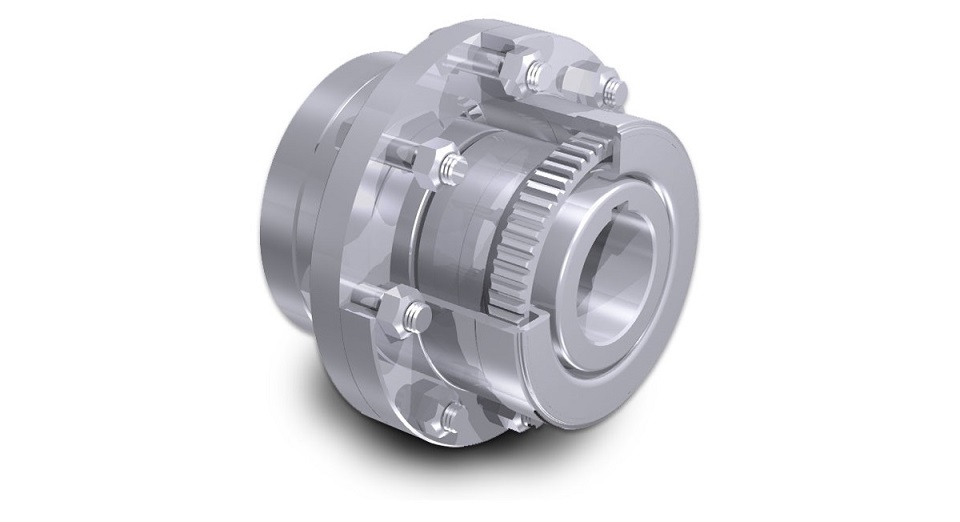
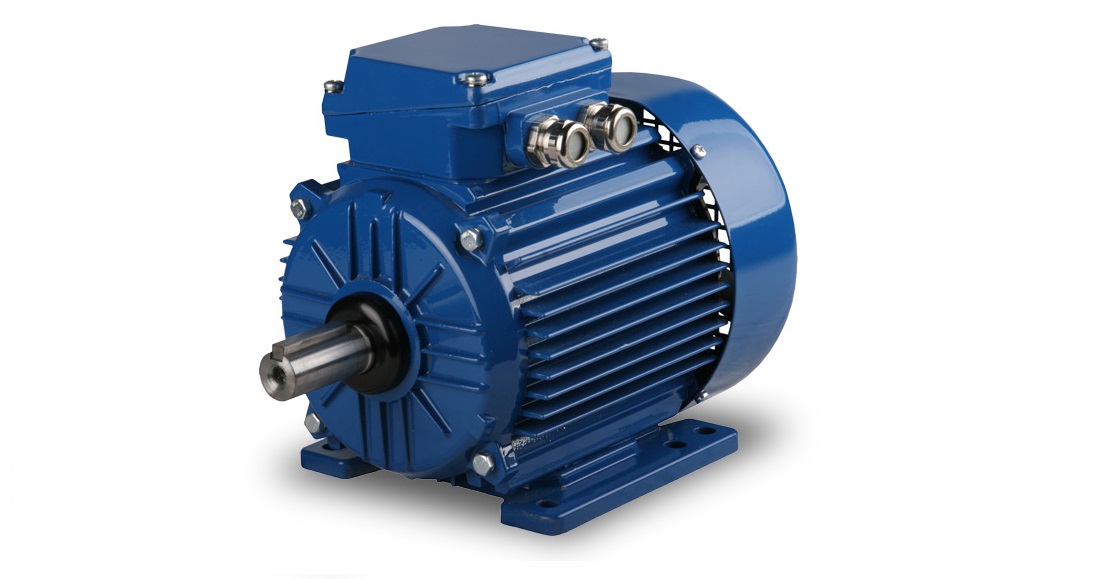
Servomotor Síncrono de Stober
Además, tres características de movimiento separan a los servomotores entre sí: servomotores de rotación posicional, servomotores de rotación continua y servomotores lineales. El servomotor de rotación posicional se caracteriza por tener la salida del eje girando a 180 grados. Se colocan topes físicos en el engranaje para evitar la rotación exterior y proteger el sensor. Estos servomotores de rotación posicional se utilizan principalmente en robótica, vehículos y aeronaves. Los servomotores de rotación continua son similares a los posicionales pero pueden moverse en cualquier dirección. El controlador del servomotor de rotación continua se utiliza para controlar la velocidad y la dirección de rotación (en el sentido de las agujas del reloj o en sentido contrario) y se utiliza en una antena parabólica de radar.
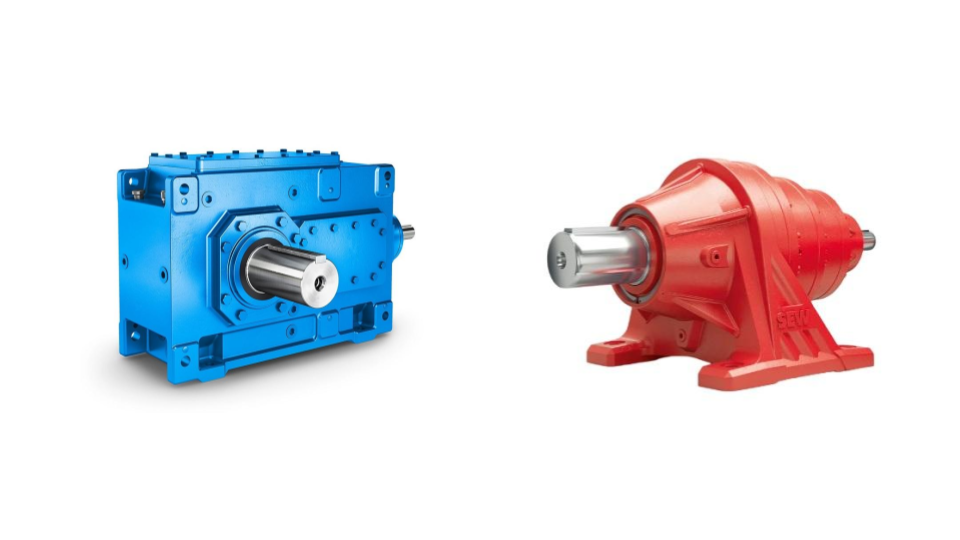
En cambio, un servomotor lineal es similar a un servomotor de rotación posicional. Sin embargo, tiene un engranaje adicional para cambiar la salida de movimiento circular a movimiento de vaivén. Los servomotores lineales se utilizan como actuadores en los nuevos modelos de aviones.

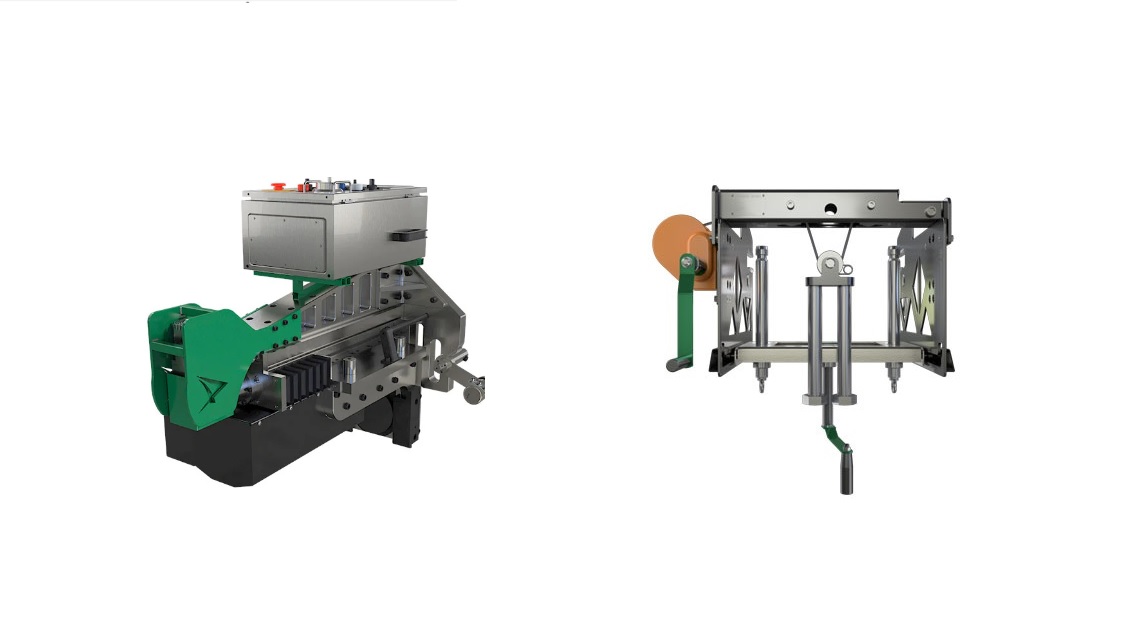
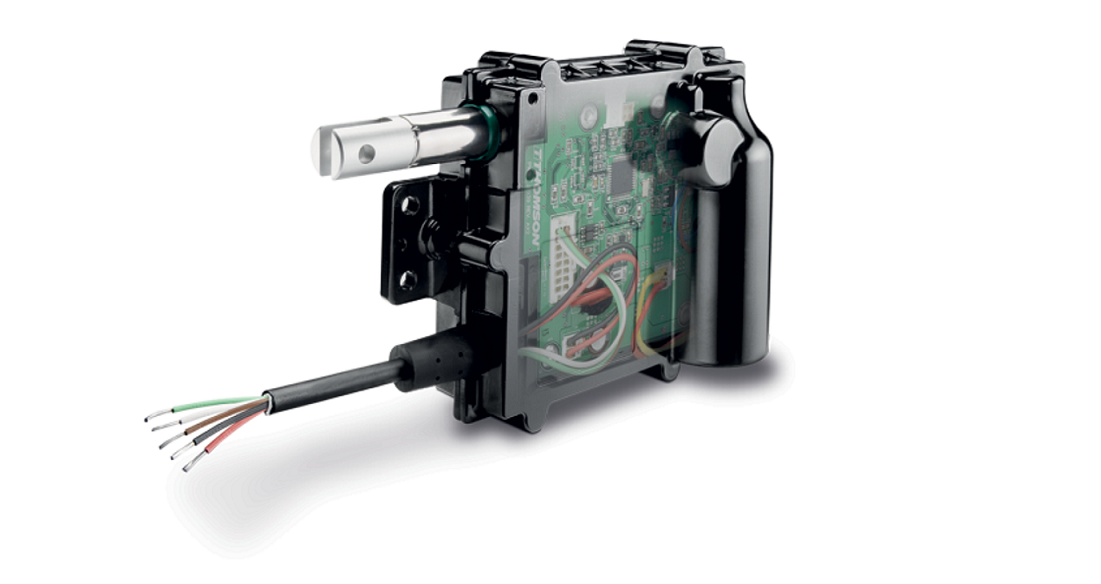
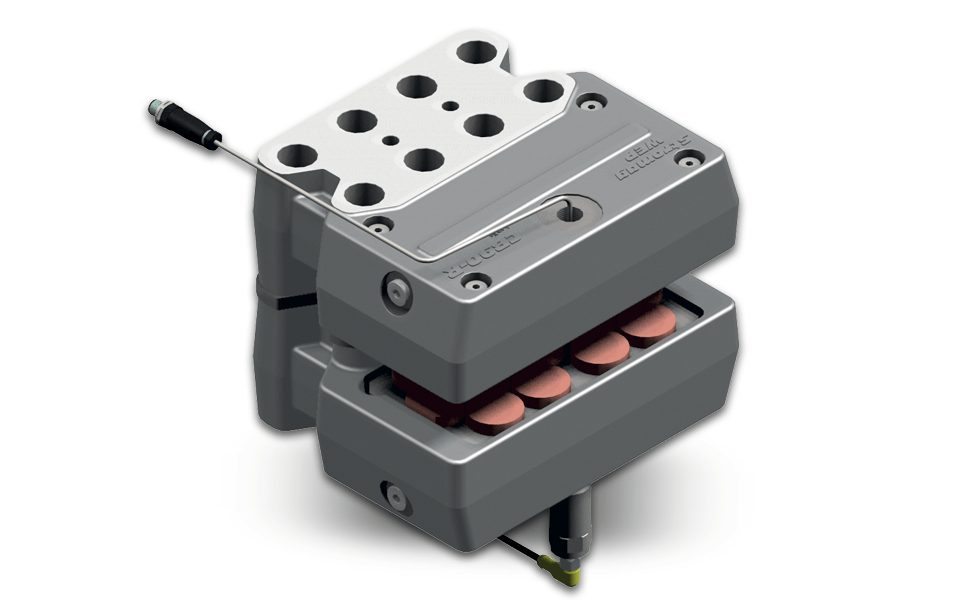
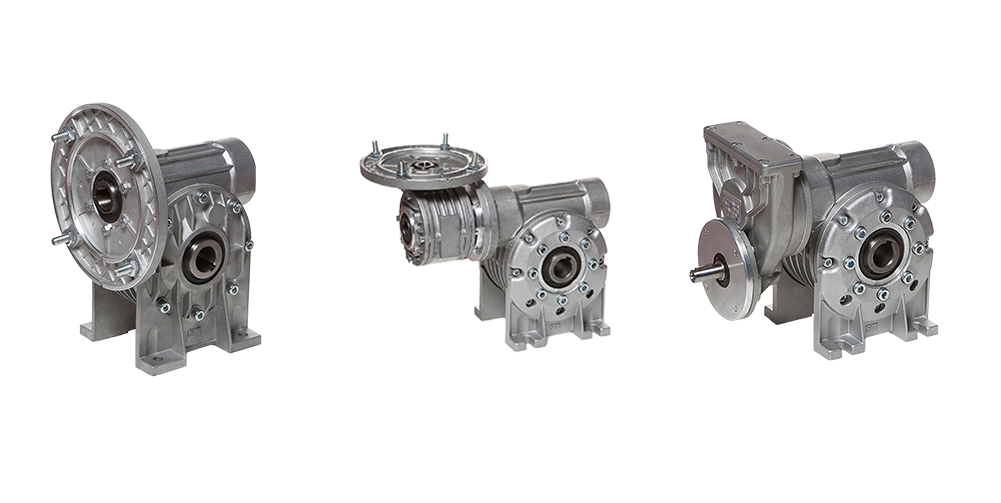
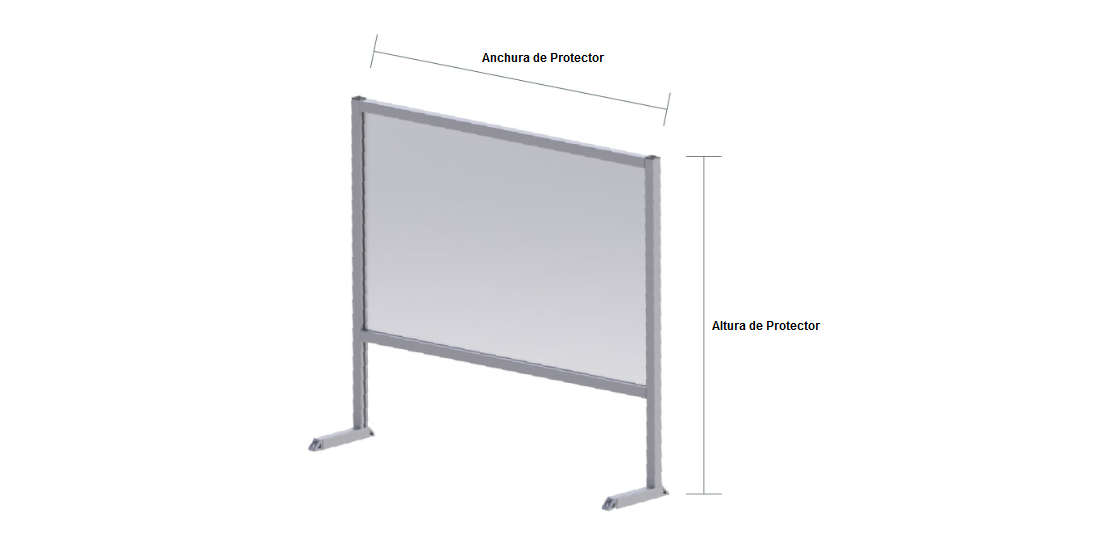
Servomotor Lineal de Wittenstein
Un servomotor es una clase particular de motor con bajas inercias y alta respuesta. Consiste en un motor acoplado a un sensor para realimentación de posición. Están diseñados para los entornos más desafiantes, que funcionan en condiciones de temperatura extrema, para aplicaciones de posicionamiento de precisión y inversión rápida, como equipos de inspección, máquinas herramienta, máquinas de embalaje y aplicaciones de recogida y colocación.
No dude en ponerse en Contacto con nosotros si tiene alguna pregunta, necesita más información o está interesado en adquirir un servomotor.
Visite las siguientes páginas para conocer las ofertas de servomotores: Servomotores y Accionamientos, Reductores de Engranajes Servo y Servomotorreductores.
HVH Industrial es un distribuidor autorizado de Wittenstein, Bonfiglioli, GAM, Apex Dynamics, NEUGART y Stober. Trabajamos en estrecha colaboración con sus equipos de ingeniería para ofrecer un servicio y una asistencia al cliente de calidad superior.
Requesting ... File size should not exceed 20 MB.

Vladimir Harutyunyan
Vladimir Harutyunyan es el fundador de HVH Industrial. El tiene un master en ingeniería mecánica y más de 10 años de experiencia en el campo de la transmisión mecánica de energía.
Puede contactar con Vlad libremente en
Linkedin: https://www.linkedin.com/in/vladharut
Vladimir Harutyunyan
Vladimir Harutyunyan es el fundador de HVH Industrial ...
Puede contactar con Vlad libremente en